Журнал
“Адаптивная Физическая Культура” № 1-2, 2000г.
Евсеев С.П., Илларионов В.И.,
Певченков В.В.
Санкт- Петербургская государственная академия
физической культуры им. П. Ф. Лесгафта,
Всестилевая Федерация Боевых Искусств.
ТАН – ДО:
ПРОФЕССИЯ – ТРЕНАЖЕР
Тренажером ХХ
I века для
обучения двигательным навыкам детей с ДЦП и
задержкой умственного развития может стать
человек.
Если взглянуть на статистические
данные, можно отметить: в длинном перечне
заболеваний, которыми страдает человечество,
детский церебральный паралич (ДЦП) занимает не
самые ведущие позиции, намного отставая от СПИДа,
рака и т.д. Звучных эпитетов типа “болезнь века”,
“чума ХХ века” церебральные параличи также
никогда не имели. Но вряд ли кто будет спорить,
что в смысле заметности им нет равных. Ведь
“лицом” этого заболевания являются
двигательные нарушения и отсутствие бытовых
навыков. Поэтому основная задача, которую
пытаются решить люди, соприкоснувшиеся с ДЦП в
силу жизненных обстоятельств – научить ребенка
правильно двигаться и самостоятельно себя
обслуживать.
Обычно нормальные здоровые дети
осваивают все это сами. Наблюдая за старшими
ребятами или более развитыми сверстниками, они
стараются подражать им, самостоятельно
корректируя свои движения. Суть бытовых навыков
схватывают “налету”. Быстрота и четкость
появляются со временем. Такое обучение иногда
называют методом “проб и ошибок” (в более
деликатном выражении методом “упражнений”)
[1,с.9].
При ДЦП на такое саморазвитие
рассчитывать не приходится. Ведь дети с
двигательными проблемами часто психологически
подавлены, стесняются своего состояния, да и круг
общения у них ограничен. Корректировать себя
самостоятельно им трудно. Ну как им заставить
ходить свои ножки правильно, если мышцы
ослаблены вследствие малоподвижности, либо
мышечный тонус не нормален. А если всему этому
сопутствует задержка умственного развития и
плохое зрение? Как такому ребенку объяснишь: что
правильно и что не правильно. Значит
, в нашем распоряжении остается одно:
выполнять действие вместе с ним, двигая его ручки
и ножки. И делать это до тех пор, пока мышцы не
включатся в работу. В данном случае мы используем
так называемый метод “пассивных движений” (или
как его иногда называют –
метод “жесткого руководства”) [1,с.21].
Вот, например, как учат ползать: “Мать
поддерживает ребенка в горизонтальном
положении, а массажист и врач попеременно
переставляют ему ручки и ножки так, как они
должны двигаться у нормально развивающегося
ребенка. Ежедневно с малышом проводят пять
занятий по тридцать минут каждое. Занятия
продолжаются до тех пор, рока он не начнет
ползать самостоятельно” [2,с.24].
А вот как обучают навыкам
самообслуживания, в частности правильно есть:
“Если он не в состоянии делать нужные для еды
движения, можно встать сзади, взять его руку в
свою и совершать все нужные движения вместе. Это
придется повторить не раз, пока вы не
почувствуете, что его рука уже не
сопротивляется… уже идет за вашей… уже начинает
действовать самостоятельно” [3,с.113]. Чтобы
улучшить качество обучения таким вот действиям,
была даже предложена специальная перчатка для
совместной тренировки движений пальцев и кисти
[4,с.153]. Надевалась она на руку взрослого. Затем к
внутренней стороне перчатки специальными
ремешками крепилась рука ребенка, причем каждый
детский пальчик соединялся с одноименным
пальцем методиста. В этом приспособлении можно
было сжимать и разжимать пальцы, брать любые
предметы, рисовать, при этом ребенок чувствовал
все нюансы движения.
Как можно заметить, в приведенных
примерах формирование двигательных навыков и
умений осуществляется в искусственных условиях,
что конечно же позволяет избежать ошибок.
Ребенок сразу осваивает правильный вариант. Но
ведь это были не самые сложные двигательные акты.
А как учить ребенка правильно ходить? Это ведь
главная цель обучения? Прежде, чем ответить на
этот вопрос, давайте определимся, какие факторы
влияют на правильную походку (как, впрочем, и на
любое другое действие).
Первое условие – это четкое
представление обо всех нюансах данного
двигательного акта. Если оно отсутствует – мозг
не сможет отдавать мышцам правильные приказы.
И.П.Павлов писал: “Раз вы думаете об определенном
движении…вы его невольно, этого не замечая,
производите
” [5,с.98]. Если
постоянно “прокручивать” мысленно идеальный
вариант действия, это улучшает его выполнение на
физическом уровне, заставляет мышцы работать
точнее.
Второе условие – иметь подготовленный
суставно-мышечный аппарат. Насмотревшийся
боевиков ребенок может иметь очень четкое
представление об ударах ногами, а вот выполнить
их не сможет. Если не разработан тазобедренный
сустав и не растянуты мышцы и связки ног,
движение получится лишь жалким подобием
задуманного.
Третье условие – уметь удерживать
равновесие во время движения. “Жизненная
важность равновесия,- писал доктор П.Брэгг, -
становится очевидной при рассмотрении процесса
ходьбы, при которой нам приходится все время
балансировать – сначала на одной ноге, а потом -
на другой, перенося вес тела вперед, слева
направо и справа налево. Действительно, эти
движения требуют удивительного равновесия, если
учесть, какая масса человеческого тела
приходится на такое небольшое основание, как
стопа… Правильная походка – это искусство
сохранения равновесия на неустойчивых ногах”
[6,с.61].
Наконец, четвертое условие – это
умение корректировать свои действия,
приспосабливая идеальный вариант к внешним
условиям, которые предопределяют его выполнение.
Существует даже физиологический афоризм:
“Головной мозг знает, как начнется движение, но
не знает, как оно закончится”. В процессе самого
движения в зависимости от конкретных условий
окружающей среды, от того или иного фактора это
движение моделируется и видоизменяется [7,с.61].
Теперь самое время вернуться к вопросу
обучения правильной ходьбе. Как это происходит?
Ну, например, так: один методист, стоя впереди
ребенка лицом к нему, поддерживает его за плечи; а
двое других, сидя на полу, руками двигают его ноги
– один правую, другой левую [8,с.1
58]. Или так: ребенок стоит между двух
натянутых канатов, держась за них; а двое
методистов, сидя на корточках, руками двигают его
ноги, имитируя шаговые движения [8,с.260].
Согласитесь, это не самые лучшие варианты.
Двигать руками ноги – это, примерно, то же самое, что двигать ногами руки.
Почему, собственно, нельзя двигать ноги ребенка
своими ногами? Они в два раза сильнее, да и
удобнее так.
Оказывается, ноги тоже используются.
Когда ребенок находится в брусьях, методист
стоит сзади больного и, удерживая его за плечи
“…своими ногами регулирует амплитуду и силу
движения каждой ноги больного, производя шаговые
движения одновременно с ним” [9.с.159]. Согласитесь,
тоже далеко до идеала. А если попробовать
соединить нижние конечности ребенка и методиста
каким-нибудь приспособлением? Руки ведь
пробовали соединить при помощи перчатки. Чем
ноги хуже?
И такое уже было. В качестве средства
обучения использовались лыжи – “…два плоских
куска дерева примерно двенадцать на семьдесят
пять сантиметров (длина определялась ростом
ребенка). В десяти сантиметрах от переднего края
в отверстие вставлялась палка, доходящая до
головы ребенка. В центре было специальное
крепление, надежно удерживающее ногу” [10,с.136]. А
вот как происходил сам процесс обучения: “По
нашей программе,- пишет мать больной девочки,- мы
должны были заниматься лыжами дважды в день.
…Общая продолжительность… занятий доходила
теперь до четырех часов в день, и лыжи были самой
трудной частью. Мы вставляли ноги Карен в
крепления, давали в руки палки
, приделанные впереди к лыжам, потом
вставали на лыжи сзади и учили ее ходить, толкая
их поочередно вперед. Карен была маленькая, но не
такая уж легкая, а вместе с корсетом ноша
оказывалась вполне ощутимой. …Мы щедро посыпали
пол кукурузной мукой, чтобы уменьшить трение
дерева по дереву” [10,с.147].Далее описывается
корсет, “который охватывал все тело”, и система
ремней, удерживающих ногу в физиологически
правильном положении. Ну что, конечно можно и так.
Но ведь таким способом мы вырабатываем так
называемый “лыжный шаг”. Ребенок так и будет
ходить, шаркая ногами.
Вообще все перечисленные способы
обучения ходьбе вызывают противоречивые
чувства. С одной стороны, методисты трудятся
“как пчелки”, обучая ребенка шагать. Для этого
им самим порой приходится находиться в
неестественных позах. С другой стороны, все это
так далеко до правильного двигательного акта,
что его,если можно так выразиться, “даже в
бинокль не видно”. Да и других минусов
достаточно: повороты трудно выполнимы,
мобильность низкая. Нет, так можно научить только
“ковылять потихонечку”.
Есть еще один путь решения проблемы:
технический. Ведь существуют же аппараты
искусственного кровообращения, искусственной
вентиляции легких, искусственная почка. Почему,
собственно, не сконструировать аппарат
“искусственное движение”? Каким он должен быть?
Прежде всего, он должен иметь “руки”, чтобы
управлять руками ребенка, и “ноги”, чтобы
передвигать ноги ребенка, - значит, должен быть
человекоподобным. Как минимум, он должен уметь
выполнять цепочку
действий:
лежал – сел – встал – пошел; воспроизводить все
необходимые движения конечностей, не превышая
физиологических пределов; выполнять действия с
нужными мышечными усилиями... Продолжать
перечень нет смысла, т.к. уже по перечисленным
требованиям становится понятной вся сложность
такого устройства.
Очевидно, конструкторов это не пугает,
т.к. нечто подобное уже существует. Об одном из
таких двигательных тренажеров рассказал в своей
книге Кевин Уорвик, авторитетнейший в мире
специалист в области робототехники: “Это
гидравлическое устройство, у которого есть
бедренные и коленные суставы. Сначала в машину
забирается здоровый человек, он стоит,
поворачивается, ходит, поднимается по лестнице и
так далее. Машина у него “учится”, и
впоследствии, когда здорового человека заменяет
инвалид, она делает все то же самое [11,с.44]. Но даже
эта сверхсложная конструкция лишь чисто условно
может называться “двуногим роботом”. Вот как
описывает возникающие при создании
человекоподобных конструкций сложности сам
профессор кибернетики Кевин Уорвик, человек,
которого называют “пророком эры роботов”:
“…При попытках создать человекоподобного
робота возникают серьезные проблемы. Даже если
бы нам удалось сконструировать пару хороших
“рук”, - управлять ими, добиться их координации,
гибкости и так далее – довольно трудно. А если бы
нам все-таки удалось добиться и этого, вряд ли мы
смогли бы придать необходимую чувствительность
пальцам. Далее. Мы, возможно, могли бы с огромным
трудом сконструировать тело, поместив внутрь
него мощный источник питания, “пристроить” к
телу ноги и даже усадить его. А вот зафиксировать
эту сверхсложную конструкцию в положении стоя
былобы чрезвычайно сложно, и уж вовсе невозможно
“заставить” ее правильно ходить. В общем, в
настоящий момент мы и близко
не
подошли к созданию такого робота” [11,с.45].
Из всего этого можно сделать вывод: на
сегодняшний день роботам также можно поставить
диагноз – ДЦП. Сидят плохо, стоят неустойчиво.
Необходимо подчеркнуть, что мы имеем в виду
человекоподобных двуногих роботов. Именно они
могут выполнять действия, максимально
приближенные к человечиским. “Четвероногие” и
“шестиногие” машины двигаются лучше и
устойчивее, но, как говорится, неполюдски. Да и
держать такого монстра в квартире…
Так что же остается: надеяться на
появление тренажера-киборга, а пока
приспосабливать, как метко заметил профессор
Скворцов, “…ребенка к его инвалидности – чтобы
лучше ходил на плохих ногах, лучше двигал
скрюченными руками” [12]? Или мы что-то упустили в
наших рассуждениях?..
Человек учит ходить
робота, а потом этот робот учит ходить инвалида.
Ну почему человек не может сразу, напрямую учить
инвалида? Неужели никак не обойтись без этого
кибернетического посредника? Ведь прикрепляют
же иногда поврежденный палец на руке полосками
липкого пластыря к соседнему здоровому, чтобы
последний вовлекал в движение травмированный
палец [7,с.152]. Были попытки соединить руки
перчаткой. Ноги лыжами соединяли.
Так может использовать этот же принцип
только “по большому счету”, “по крупному”.
Соединить ребенка, неумеющего ходить, и того, кто
его обучает, в тандем: сразу и ноги с ногами и руки
с руками. Это, конечно, не два пальца
лейкопластырем обмотать, но, в общем, технически
решаемо. Только лыжи тут надо заменить. Ботинки
будут удобнее, надо только соединить их общей
подошвой. Инструктор бы выполнял различные
движения: стоял, поворачивался, ходил, поднимался
по лестнице (словом, делал все то, что делала
машина, о которой рассказывал профессор Уорвик),
а ребенок пассивно повторял эти движения. Он бы
смог почувствовать каждой клеточкой своего тела:
что и как надо делать.
Вроде теоретически логично,
технически возможно. Так что же: да здравствует
новый способ? Нет, радоваться пока повременим.
Пришли к тому, с чего и начали. Опять самое слабое
звено в цепи наших рассуждений – пресловутый
“человеческий фактор”. Ведь ограниченность
физических возможностей человека вряд ли
позволит ему выполнять все то, о чем мы говорили
выше. И действительно, если бы все было так
просто, это бы уже делали. А тут еще вместо лыж -
используются ботинки. На лыжах хоть палки были. А
в ботинках за что держаться? За шнурки?
Так что же, тупик?.. Может и впрямь
человек слабоват для роли тренажера? А что, если
взглянуть на все это с точки зрения теории Кано
Дзигоро, мастера боевых искусств, замечательного
философа, отца современного дзюдо?
Дзюдо и ДЦП. Могут ли соприкоснуться
столь разные понятия? Оказывается, еще как могут.
Дело в том, что кроме создания технического
комплекса приемов дзюдо, Кано разработал
стройную теорию, согласно которой грубая
физическая сила в борьбе не имеет большого
значения. Важны не физические возможности борца,
а умение ими “по-хозяйски” распорядиться.
Примерно такой смысл вкладывал Кано в свои
тезисы о “наиболее результативном приложении
силы” и “максимально эффективном использовании
тела и духа”. Вот давайте и задумаемся: а
эффективно ли мы используем свое тело, и
результативно ли мы прикладываем свою силу,
обучая ребенка ходить?
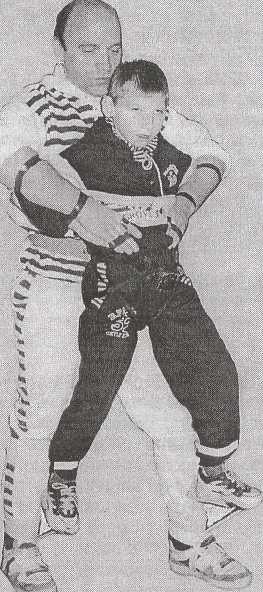
Выполняя вместе с ребенком, например,
шаг правой ногой, методист должен одновременно
решать две задачи: совершать действия (двинуть
правую ногу и левую руку вперед, правой рукой
сделать отмашку назад) и производить удержание
(не давать ему просесть под тяжестью своего тела
и не допустить заваливания в сторону). Наиболее
значимой по важности и, главное, по трудозатратам
является последняя. Держат ребенка руками.
Находясь в постоянном напряжении, они быстро
устают. Поэтому методист, не надеясь на свои силы,
страхуется каким-нибудь дополнительным
приспособлением: брусьями, канатами, ходунками и
т.п. Странное дело. Взрослые люди могут свободно
передвигаться, взяв ребенка на руки или посадив
на плечи, и оказываются в этом смысле
несостоятельными, поставив ребенка на “ватные”
ножки перед собой. Почему?
Дело в том, что человек представляет
собой сложнейшую колебательную систему.
Например, человеческая рука представляет собой
маятник. Этот маятник в свою очередь состоит из
множества более мелких маятников. Все они, вплоть
до фаланги мизинца совершают колебательные
движения, причем в разных плоскостях.
Аналогичное можно сказать о любой части тела.
Даже при максимально расслабленной мускулатуре
совершаются микроскопически малые движения: и во
время сна, и при наркозе… И так от рождения до
самой смерти (этот феномен микровибрации тела
открыл австрийский ревропатолог Рохрахер) [5,с.98].
Отсюда вывод: у нас колеблется все, всегда и
везде.
Суть обучения методом “жесткого
руководства” можно сформулировать так: одна
колебательная система пытается управлять другой
колебательной системой. Периоды колебаний у них
различны, частота неодинакова, амплитуда разная.
Если обучающий совершает так называемые
гармонические колебания (т.е. все время старается
вернуться к устойчивому вертикальному
положению), то колебания ребенка с ДЦП больше
напоминают хаос. Вот и получается, что последний,
качаясь как “Ванька-встанька” в разные стороны
выводит себя, а заодно и того , кто его держит, из
состояния равновесия. Методист пытается
удержать ребенка, находясь в неустойчивой позе.
Но, кроме того, ему надо выравнивать и свое
положение. А если в какой-то момент их колебания
совпадут по частоте, т.е. обе системы войдут в
состояние резонанса и амплитуда колебаний резко
возрастет – в этот момент можно даже упасть. К
тому же руки методиста заняты, поэтому он лишен
возможности совершать ими компенсаторные
движения. Суммируя все это можно сформулировать
главную проблему удержания: методист не может
держать ребенка в равновесии, т.к. тот мешает ему
сохранять свое собственное (методиста)
равновесие.
А можно ли
согласовать колебания ребенка и взрослого?
Можно. Надо объединить их в тандем, как уже и
предлагалось. А, поскольку, эти две системы
состоят из множества малых колебательных систем,
необходимо каждую такую минисистему обучающего
согласовать с аналогичной системой на теле
ребенка. Для этого поднимаем таз последнего на
уровень таза инструктора (таким образом, мы
сближаем их общие центры масс, которые, как
известно, находятся в области таза) и получаем
возможность для соединения туловища одного с
торсом другого. Ведь колебания именно этих самых
массивных и объемных частей тела мешали больше
всего. Кроме того, это дает возможность
“согласовать” их руки: пальцы с пальцами, кисть
с кистью, предплечье с предплечьем и выполнять
ими различные действия. А как соединить ноги?
Ведь теперь голеностопы и колени ребенка
значительно выше, чем одноименные суставы
взрослого? Значит это надо сделать через
какую-нибудь жесткую механическую связь. И
давайте не будем утверждать, что это невозможно.
Давным-давно Архимед, осознавший
возможности рычага, просил всего лишь одну
“точку опоры” и “грозился” перевернуть мир. На
теле человека этих самых точек опоры
бесчисленное множество.
Что мы получаем в результате
такого соединения. Тело ребенка в смысле
движений даже “пикнуть” не может. Оно полностью
подчинено колебаниям инструктора, который может
совершать любые компенсаторные движения,
необходимые для сохранения равновесия: взмах
рукой, наклон корпуса, шаг в сторону… А ребенок, в
свою очередь, воспринимает и запоминает все это
без концентрации внимания на уровне подсознания.
Надобность в подстраховочных устройствах
отпадает.
Давайте взглянем,
как такой способ обучения согласуется с теми
условиями, которые мы определили как необходимые
для выполнения правильных действий в начале
статьи. В тандеме ребенок получает четкое
представление о любом движении и действии. Мы
можем разрабатывать суставно-мышечный аппарат,
делая любые упражнения на растяжку и осуществляя
движения в любых суставах. О равновесии мы уже
сказали. Что касается приспособляемости, то в
тандеме ребенок учится реагировать на различные
непредвиденные обстоятельства: толчки,
спотыкания и т.п.
Что будет конкретно из себя
представлять конструкция? Для нижних
конечностей она может быть выполнена в виде
сдвоенного ортеза, который можно назвать
тандезом. Верхние конечности могут соединяться с
помощью перчатки, либо лейкопластырем. Туловища
взрослого и ребенка соединяются двойным
корсетом, либо системой ремней. Но все это
очень упрощенно. Вообще же, если
понятен принцип, создать конкретные конструкции
не составит труда. Для этого лишь нужно озадачить
себя вопросом: как результативно приложить силу
и как эффективно использовать тело.
Кстати, сам Дзигоро Кано писал:
“Принцип максимально эффективного
использования тела и духа является
основополагающим принципом, который направляет
всю технику дзюдо. Однако в нем заключено нечто
большее. Тот же принцип может быть применен для
исправления дефектов и совершенствования
человеческого тела…” (выделено нами – авт.)
[13,с.297]. Интересно, что великий мастер хотел этим
сказать? Может быть что-то подобное тому, о чем в
этой статье говорили мы? Кто знает…
ЛИТЕРАТУРА:
Евсеев С.П. Императивные тренажеры (Основы
теории и методики применения): Учебное пособие /
ГДОИФК им. П.Ф.Лесгафта, Спб, 1991 – 127с.
Журнал “Будь здоров!” № 4(70), апрель,1999г. Игорь
Скворцов, д.м.н.проф. “Миф о неизлечимости ДЦП”,
стр.21-25.
Каган В.Е. – Преодоление: неконтактный ребенок в
семье. Спб., Фолиант, 1996, - 155стр., ил.
Бортфельд С.А., Рогачева Е.И. – Лечебная
физическая культура и массаж при детском
церебральном параличе. – Л.:Медицина, 1986. -176с.,1,2
а.л.ил. (Библ. среднего медработника).
Позвоночник – ключ к здоровью. П.С. Брэгг, С.П.
Махешварананда, Р.Нордемар, В.Преображенский. –
Спб.: ТОО “Диамант”, ООО “Золотой век”, ООО
“Лейла”, 1999, - 272с., ил.
Иван Б. Матев, Стефан Д. Банков – Реабилитация
при повреждениях руки. –София: Медицина и
Физкультура, 1981. – 256с., ил. –Перевод с
болгарского Татьяны В. Матвеевой.
Шамарин Т.Г., Белова Г.И. – Возможности
восстановительного лечения детских
церебральных параличей. – Элиста.: АПП
“Джангар”, 1999. -168с., ил.
Семенова К.А. – Восстановительное лечение
больных с резидуальной стадией детского
церебрального паралича. – М.:Антидор, 1999 – 383с.
Мари Киллили. – Детский церебральный паралич.
История о том как родительская любовь победила
тяжелую болезнь, - перевела с англ. И.Сендерихина.
– Спб: Питер Ком, 1998. – 288с.
Уорвик Кевин. – Наступление машин. Почему миром
будет править новое поколение роботов:
Авторизованный перевод с англ. Е.В.Кокуриной. –
М.: МАИК “Наука
/ Интерпериодика”,
1999. – 240с.: ил.
Газета “Известия” № 91, 17апреля 1991г. Л.Ивченко.
“Безнадежен – еще не значит обречен”.
Долин А.А., Попов Г.В., - КЭМПО – традиция воинских
искусств. – 2-е изд. – М.: Наука. Главная редакция
восточной литературы, 1990. Стр.291-313.