tonus
is anomalous? And if this is also accompanied with slow cognitive development and impaired
vision? How can we explain to such children what is right and what is wrong? Thus, we can
only perform actions with them, moving their arms and legs, and continuing to do so until
their muscles begin working. This is a method of passive movement, or as it is sometimes
called, a method of rigid supervision (1, p. 21).
This is, for example, how a child is taught to crawl: “The mother
holds a child horizontally, and the masseur and the doctor move his legs and arms in turn,
simulating the crawling movements of a normally developing child. A series of five
30-minute exercises should be done every day, until the child begins crawling
independently (2, p. 24).‚ÄĚ
Another example demonstrates how to teach a child to take care his own
needs independently, in particular feeding himself: “If he is unable to perform actions
necessary for feeding, we can stand behind him, take his hand in our hand, and perform all
the necessary motions together. We will have to repeat them several times until we can
feel that his hand lo longer resists... follows our hand... and begins moving
independently‚ÄĚ (3, p. 113). To improve such teaching technique, a special glove was
developed for simultaneous training of movements of the hand and fingers (4, p. 153). An
adult puts the glove on one of his hands. Then the child’s hand is fastened to the inner
part of the glove by means of special straps in such a manner that each finger of the
child’s hand is attached to the corresponding finger of the hand of the trainer. This
equipment allowed the child to clasp and unclasp his fingers, take any object, and draw
pictures. At the same time, he can feel all the nuances of the movements.
As you can see from these examples, acquiring motor skills is realized
through creating artificial conditions, which naturally prevents erroneous behavior. The
child immediately learns the right way of doing things. But these are not the most complex
actions. What about teaching him how to walk properly? This is the major point of
teaching. Prior to answering this question, let us make a list of conditions affecting
correct walking mannerisms (as well as any other actions).
Condition number one: a clear concept of all nuances of a particular
body movement. If there is no such concept, the brain is unable to control the muscles
properly. I. P. Pavlov wrote: “If you are thinking about a certain movement … you are
performing it involuntary, without being aware of it‚ÄĚ (5, p. 98). If we repeatedly
imagine a perfect variant of a movement, it will improve the performance of this movement
on the physical level, making the muscles work with increased accuracy.
The second condition is having a well-prepared joint-muscular system.
Having watched many action movies, a child might develop a very good concept of how to
kick, but he will be unable to perform this movement. If the hip joint is not trained and
the muscles and ligaments of legs are not flexible enough, the movement will be a parody
of the concept.
Condition number three is the ability to keep balance during walking.
Dr. P. Bragg wrote: “The vital necessity of maintaining balance becomes obvious when
examining the process of walking. We constantly need to keep our balance, first standing
on one foot, then on the other, shifting the weight of our body forward, from the left to
the right, and from the right to the left. Indeed, these movements require perfect
balance, taking into account the fact that the weight of the human body is supported
merely by such a small foundation as a foot… The correct manner of walking is the art of
keeping balance on unstable legs‚ÄĚ (6, p. 61).
Finally, condition number four: the ability to correct our own
movements, adjusting the ideal variant to the conditions that are prerequisites of its
performance. There is a saying among physiologists that goes: “The brain knows how a
movement begins, but knows nothing about how it will end.‚ÄĚ ‚ÄúA movement is modeled and
can be changed, adjusting to changes in the environment, or depending on various
conditions in the process of performing the movement‚ÄĚ (7, p. 61).
Now, let us go back to the issue of teaching how to walk properly. How
is it realized in practice? Here is an example: a trainer stands in front of a child,
facing him, and holds him by his shoulders; two other trainers sitting on the floor move
his legs with their hands‚ÄĒone moves his left leg, the other his right hand (8, p. 158).
Another example: a child stands between two suspended ropes, holding them; two trainers
squatting on the floor move his legs with their hands, imitating walking movements (8, p.
160). Not particularly good variants. Moving legs with hands is almost like moving hands
with legs. Would it not be easier to move the child’s legs with trainer’s legs? They
are twice as strong, not to mention the fact that this would be much more comfortable.
Such methods also exist. When a child is held by the bars, a trainer
stands behind the child, holding him by his shoulders, and “…uses his legs to control
the amplitude and force of each leg of the patient, making walking movements together with
the child‚ÄĚ (9, p. 159). Far from being perfect, indeed. What if we somehow fasten the
child’s and trainer’s lower limbs to each other by means of some device? There were
successful attempts to do so with hands; why not try it with legs?
This attempt has also been undertaken. ‚ÄúSkis‚ÄĚ were used as a means
of training: “ …two 12 by 75 cm planks (the length was determined by the
child’s height). A stick reaching the child’s head was inserted in a hole ten
centimeters away from the frond edge of either plank. In the middle of either plank there
was a reliable foot binder‚ÄĚ (10, p. 136). Below is the training method: ‚ÄúAccording to
our program,‚Äô the mother of an impaired girls says, ‚Äėwe were supposed to do skiing
twice a day. … The total length …of exercises then amounted to up to four hours a day,
and skiing was the most difficult part of it. We put Karen’s feet into the binders, she
would grab the sticks, and then we would stand behind her on the skis and trained her
walking pushing them forward in turn. Karen was little, but not too light, and together
with the corset it was quite heavy. … We generously spread corn flower on the floor to
reduce the friction of wood against wood‚ÄĚ (10, p.147). What follows is a description of
the corset, which ‚Äú was wrapped around the whole body,‚ÄĚ and a system of straps that
secured the foot in a physiologically correct position. Well, such a method can be used of
course, but what it trains one to do is to make skiing movements. As a result, the child
will walk shuffling his feet.
All the abovementioned methods of training to walk leave one with
contradictory thoughts. On the one hand, trainers are working hard, teaching a child how
to walk, spending a great deal of time in uncomfortable, unnatural positions. On the other
hand, these are still far from correct walking movements. There are other disadvantages,
as well: turns are difficult to make, and the mobility is low. No, this is a dead end.
There is another way of solving this problem, however‚ÄĒtechnology. We
all know about blood circulation apparatuses, breathing apparatuses, kidney substitution
apparatuses, etc. Why not design an apparatus that would aid in walking? What kind of
machine should it be? It should have ‚Äúarms‚ÄĚ to control the child‚Äôs arms, and
‚Äúlegs‚ÄĚ to move the child‚Äôs legs; thus it should resemble the human being. As a
minimum, it should be able to perform a sequence of movements: lie down, sit up, stand up,
walk; to reproduce all necessary movements of the limbs, within one’s physiological
abilities; plus it should perform actions with the necessary muscular effort... There is
no need to continue this list, since it is already obvious that this should be a very
complicated piece of machinery.
Obviously, engineers are not afraid of these obstacles, since similar
devices do exist. One of such machines was described by Kevin Warwick, a leading
specialist in the area of robotics, in one of his books: “It is a hydraulically driven
machine that has hip joints and knee joints. Originally, a healthy adult climbs into it,
and then stands, turns, walks, climbs up and down the stairs, and so on. The machine
‚Äėlearns‚Äô from him, and later when an invalid takes the place of the healthy person, it
repeats these actions‚ÄĚ (11, p. 44). But even this extremely complicated device can
hardly be called a two-legged robot. This is what professor of cybernetics Kevin Warwick,
a man to whom many refer as the ‚Äúprophet of the Robot Age,‚ÄĚ says about difficulties of
creating machines resembling human: “Many problems arise when attempting to create a
human-resembling robot. Even if we had managed to design a good pair of ‚Äėarms,‚Äô
controlling them to achieve the necessary coordination, flexibility, and so on is rather a
complicated task. And even if we had managed to do so, it is highly unlikely that we would
have been able to program the necessary sensitivity in the fingers. Further, we could
probably, with a great difficulty create a body with a powerful power supply inside,
attach legs to it and even make it sit. But to make it stand without falling would be
extremely difficult, and totally impossible to make it walk right. In other words, at the
present moment we are as far from creating such a robot as we were before.‚ÄĚ (11, p.
45).
Conclusion: today robots have all the symptoms of cerebral palsy‚ÄĒthey
sit poorly, they stand unstably. It is necessary to say, however, that we mean human-like,
two-legged robots. Only these robots can perform movements closest to similar human
movements. Four-legged and six-legged machines moved better and are better balanced, but
their movements are so inhuman. Then again, to keep such a monster in an apartment…
So, what should we do now? To hope for the creation of a cyborg
trainer, and in the meantime, as professor I. Skvortsov once said, to adapt “… a child
to its disability, so that he would better walk on his poor legs, or better move his
crooked arms‚ÄĚ (12)? Maybe we made a mistake somewhere in our reasoning?
A man teaches a robot to walk, and later the robot teaches an invalid
to walk. Why can’t a man teach an invalid directly? Can we do without this cybernetic
intermediary? Sometimes a broken finger can be firmly attached by means of an adhesive
tape to a neighboring healthy finger, so that the latter will involve the former in
performing movements. (7, p. 152). Remember the glove and the skis.
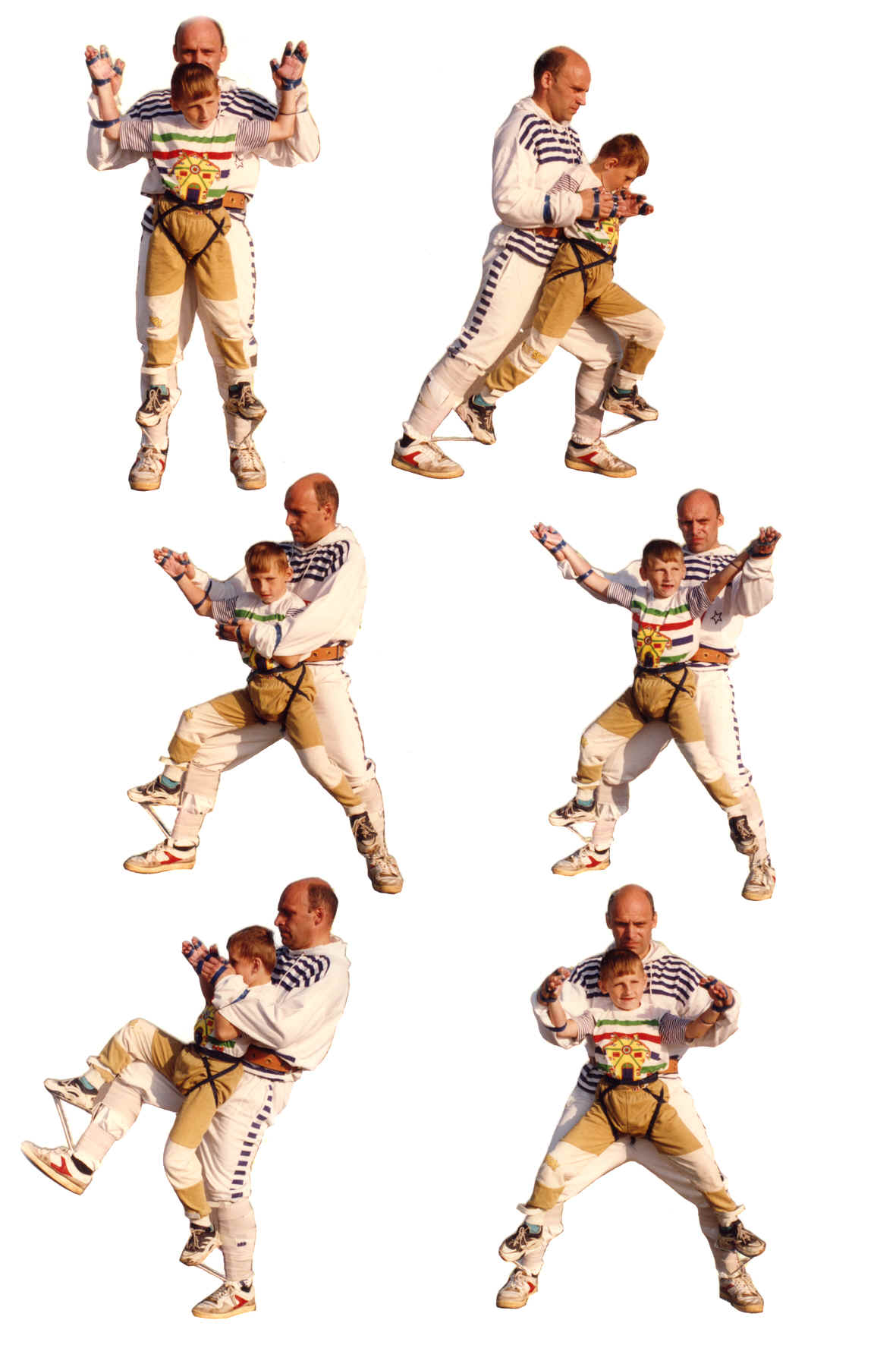
Maybe we should use the same principle but on a large scale? To unite a
child unable to walk and his trainer in a tandem‚ÄĒarms with arms, legs with legs, all at
the same time. This is not as easy as with two fingers and a piece of adhesive, but still
technically possible. Skis, however should be replaced with something more
comfortable‚ÄĒboots for example. They just need to have a common sole. The trainer would
do different body movements: stand, turn, go up and down the stairs (all the movements
that the robot professor Warwick was telling us about), and the child would passively
reproduce these movements. He would then feel what and how should be done with every cell
of his body.
Looks very logical, even technically possible. So, have we found the
final solution yet? No, not really. We have come back to where we started. The weakest
element in our reasoning is the human factor. Limited physical abilities of the human
being will not allow him to do all we have discussed earlier. Really, if it were so
simple, it would have been done long ago. Now we have boots instead of skis. The skis had
sticks, at least. What can you get a grip on when in boots? The shoelaces?
So, another dead end? Maybe a person is really to inferior for playing
the role of training equipment? What if we look at it from the point of view of Djigoro
Kano, a master of martial arts, a wonderful philosopher, and the founder of contemporary
Judo?
Judo and cerebral palsy. How can two such different things
interconnect? In addition to creating a complex of Judo fighting lessons, Kano has
developed a theory according to which brute force does not play a crucial role in
fighting. It is not the physical abilities of the fighter that are important, but his
ability to manage them correctly. This is approximately the concept of Kano’s theses
‚Äúon the most rational application of force‚ÄĚ and ‚Äúon the most efficient use of the
body and spirit.‚ÄĚ Let us see how efficiently we use our body, and how rationally we
apply our strength when teaching a child how to walk.
When making a step with the right foot together with the child, the
trainer is bound to complete two tasks: to perform the movement (to move the right foot
and left arm forward, and to move the right hand backward), and to hold the child (not to
let him crumble down under the weight of his own body or to swing aside). The latter is
the most vital task both in terms of importance and, what is more, in terms of the effort
it requires. While holding the child, the arms are making a continuous effort, and thus
get tired very quickly. For this reason, the trainer, not relying on his own strength,
uses additional equipment for supporting himself, such as ropes, bars, crutches, etc.
Strangely enough, adults can easily walk having a child in their arms or on their
shoulders, but seem to be unable to move putting a child on his weak legs in front of
them. Why?
A human being is a very complicated vibratory system. The arm is a
pendulum, for example. This pendulum consists of a number of smaller pendulums. All of
them, including a phalanx of the little finger, perform vibratory movements in different
planes. The same can be said about any part of the body. These movements occur even when
our muscles are completely relaxed: when we sleep, or under narcosis… This happens
constantly from the moment of birth to death (this phenomenon of microvibrations of the
human body was discovered by Rochracher, an Austrian neuropathologist) (5, p. 98). A
natural conclusion would be: in our body, everything and everywhere constantly vibrates.
The method of rigid supervision can be described as follows: one
vibratory system is to try to control another vibratory system. They have different
periods of vibration, frequencies, and amplitudes. Whereas the trainer performs so-called
harmonic oscillations (i.e. constantly trying to return to a stable vertical position),
the vibrations of a child with cerebral palsy are chaotic, for the most part. These
chaotic vibrations knock the child and the person holding him out of the balanced
position. The trainer tries to hold the child being in an unstable position. In addition,
he needs to straighten his own position. If at some time, the frequencies of their
vibrations match, i.e. both systems are in resonance and the amplitude of oscillations
increases sharply, the child and the trainer can even fall. The trainer cannot help
himself keep his balance with his arms because they are holding the child. Summarizing the
above we can point out the major problem of holding: the trainer is unable to balance the
child, because the child prevents the training from keeping his own balance.
Is there a way to make the oscillations of the child and trainer to
agree with each other? Yes, there is. As we have mentioned earlier, we should combine them
in a tandem. Since these vibratory systems consist of many smaller vibratory systems, it
is necessary to match each of the trainer’s mini-systems with corresponding mini-systems
of the child. In order to do so, we should raise the pelvis of the child to the level of
the trainer’s pelvis (thus, moving together their centers of mass, which are located in
the pelvis). We can now attach the torso of the one to the abdomen of the other. The
vibrations of these most massive and large parts of the body were causing most trouble.
Additionally, this will allow their arms to agree with each other‚ÄĒfingers with fingers,
hands with hands, upper arms with upper arms‚ÄĒto perform various motions. How to fasten
the legs of the child? Now, his calves and knees are much higher than the corresponding
joints of the trainer. We need to think of some mechanical fastening system. We are not
saying this is impossible. Remember Archimedes who realized the possibilities of the lever
and threatened to move the Earth if he had a place to stand and a lever long enough. There
are numerous ‚Äúplaces to stand‚ÄĚ in a human body.
|
What is the result of this fastening system? Now, the
child’s body is secured tightly to the trainer’s body.
It is totally dependent on the oscillations of the body of the trainer,
who can perform any compensatory movements to keep his balance: waving his hands, bending
his body, stepping aside… The child feels these movements and remembers them
subconsciously without making efforts to concentrate his attention on it. There is no need
for additional equipment.
Let us see how this method correlates with the conditions that we
defined as essential in the beginning of the article. In this tandem position, the child
gets a clear notion of any body movement or action. We can work out his joint-muscular
system by doing any stretching exercise and performing any movements in any joint. We have
already covered the balance part. As for the adaptation to external conditions, in this
tandem position the child is learning how to react to various emergencies, such as pushes,
tripping, etc.
What will the structure look like in particular?
For the lower limbs a double orthesis can be used; let us call it a
tandesis. The upper limbs can be fastened to each other by means of a special glove or
pieces of adhesive. The abdomens of the adult and the child can be fastened with a double
corset or a system of straps. We are simplifying it, naturally; but if the basic principle
is clear, it is not very hard to actually design this system. One only needs to deliberate
on this problem: how to apply force rationally, and use the body and spirit efficiently. |
By the way, Djigoro Kano wrote: “The principle of the most efficient
use of the body and spirit is the basic principle defining the technique of Judo. It,
however, is something even greater than that. The same principle can be used in fixing
defects and perfecting the human body‚Ķ‚ÄĚ (italics ours) (13, p. 297). What was the
implication of this sentence? Maybe something similar to what we say in this article.
We’ll never know…